
”px4 uavcan linux“ 的搜索结果
对开源飞控自己的理解,适合新入门阅读,有很高的借鉴意义!
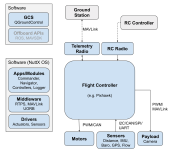
PX4从放弃到精通(四):PX4架构
标签: 架构

写在前面,目前中文互联网上关于`PX4`飞控的学习资料较少,笔者查阅了大量的资料整理成这篇博客,贡献一些学习内容,码字不易,如果帮助到您,请您帮我点点赞。
px4固件v1.11.0,我已下载更新好所有子模块,免去了翻墙改文件等一堆麻烦,下载即用






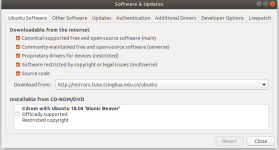
此教程,基于Ubuntu18.04 安装PX4仿真环境

飞控型号:cube orange【PX4官方用户指南中关于cube orange的描述】 飞控载板型号:Mini Carrier Board【迷你载板说明文档】 固件安装参考:The Cube User Manual V1.0

参考px4官网流程: https://dev.px4.io/en/setup/dev_env_linux_ubuntu.html https://dev.px4.io/en/setup/building_px4.html 配置过程中网速一定要好!!!!一定要好!!!!最好翻墙!!!不然会出很多...
从Simulink到PX4——Simulink-PX4插件安装与环境搭建前言0 准备工作1 安装WSL2 Setting up the PX4 Toolchain on Windows3 Setting up the PX4 Tool Chain on Linux4 Downloading PX4 Source Code5 构建代码6 ...
泡泡实验室 https://tieba.baidu.com/p/5711241560 http://shequ.dimianzhan.com/ 。

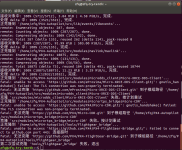
详细探索步骤参考:【PX4学习笔记】3. PX4 固件烧写(1 探索过程) 第一步(缺少此步会报错头文件不存在): sudo make cubepilot_cubeorange_console 第二步: sudo make cubepilot_cubeorange_default upload ...
PX4代码解析(1)
标签: c++


而px4则是一款常见的开源飞控固件,是自主无人机系统开发中非常常用的飞控固件。但是其对应的硬件往往都比较贵,即使是早期的pixhawk版本也要600+。 如果要开发一款廉价自主无人机系统,那么采用F4/F7/H7飞控硬件...




推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地